打开文本图片集
摘 要 论述了研制QS-650型清筛机安全辅助装置的必要性,阐述了该装置的工作原理与系统构成,并介绍了装置的安装与调试。
关键词 清筛机;旋转污土带;安全辅助装置
1 研究背景
QS-650型全断面道砟清筛机是用来清筛有砟轨道道床中道碴的作业机械,在清筛机的各工作机构中,回转污土输送带的机构被安装在整机前部车架上方,作业时,污土输送带最外端距轨面最大高度4800mm,最大抛土距离距轨道中心5500mm。而接触网支柱距轨道中心的距离为3500mm左右,工作时污土输送带处于接触网支柱外侧,存在碰到接触网支柱的安全隐患。
2 系统总体方案设计
我们采用了基于无线测距和无线遥控技术的避障方案,采用无线测距技术检测障碍物的远近、采用转角测量模块检测污土带位置和采用无线遥控技术可在观测位置较好地方控制污土带避障。
2.1 总体方案
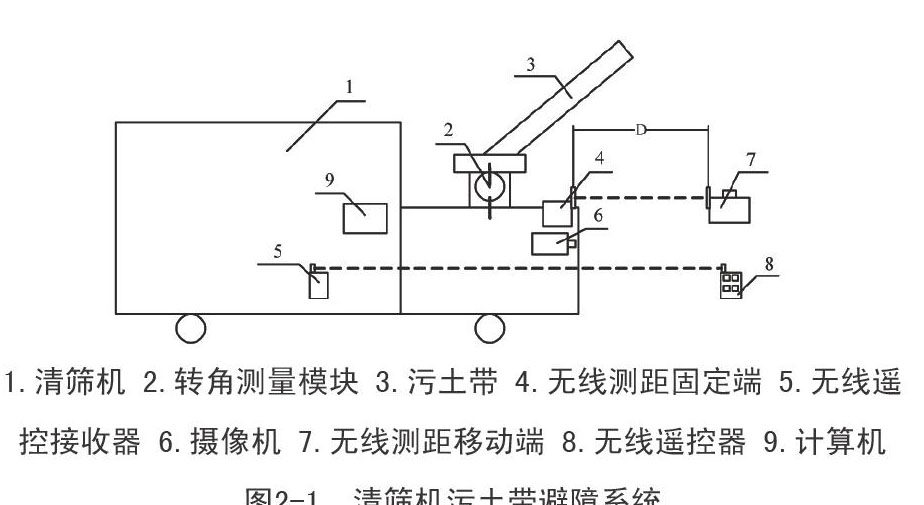
本系统分为无线测距和无线遥控两个子系统。系统安装示意图如图2-1所示,实物图如图2-2所示。
1.清筛机 2.转角测量模块 3.污土带 4.无线测距固定端 5.无线遥控接收器 6.摄像机 7.无线测距移动端 8.无线遥控器 9.计算机
无线测距系统:采用无线测距装置检测障碍物到车头的距离;采用转角测量模块检测污土带的位置;采用摄像机辅助系统避障;采用无线遥控系统控制污土带左右转、司机室警报及停车信号。
无线测距固定端安装在清筛机前端的上部,无线测距移动端放置于有障碍的位置处,转角测量结构安装在污土带旋转盘下部,系统能实时测量固定端和移动端的直线距离,计算机自动判断清筛机污土带是否需要避障。满足避障条件时,则报警;当距离很近时,则控制停车。当发生紧急状况时,车下操作人员可利用遥控器及时发射停车、报警、污土帶左转或右转信号,控制车辆,实现相应动作。
1.激光器 2.左超声波传感器 3.左摄像机
4.右超声波传感器 5.右摄像机
2.2 系统避障原理
本系统的避障原理包括以下三个步骤。
(1)计算污土带最远端坐标,以左侧为例,右侧相同。污土带位于左侧时(如图2-3所示),最远端的计算公式为:
其中,,为污土带长度,为污土带宽度,为污土带旋转中心到端板的距离,θ为污土带的转角,绝对编码器能检测到。
(2)获取无线测距的结果:固定端的无线测距结果通过串口发送给计算机进行处理。
(3)在不中断作业的情况下实现避障。
3 系统性能与特点
清筛机的作业环境恶劣,作业过程中会产生大量尘土。为满足清筛机避障环境的需要,本系统有以下几个特点。
采用无线测距方式检测接触网支柱等障碍物到车头的距离,不受天气、尘土等环境因素影响;测距范围可达100m。在5~35m范围内测量精度为±1m;
采用角度传感器对污土带转角位置进行实时检测,实时计算污土带距线路中心的距离,测量精度为±0.3m;根据接触网支柱等障碍物距线路中心的距离,自动判断是否安全;
无线遥控器控制污土带左转、右转及报警与停车信号,从而实现手动避障功能;
能自动判断污土带是否处于危险区域,在处于危险区域时,若污土带没有转回避开障碍物,可实现自动停车。
4 结论
经现场运用,本系统能满足现场环境作业需要,能有效辅助操作人员控制清筛机污土带避开接触网支柱等障碍,可以解决污土带安全生产问题,能够产生良好的社会和经济效益。
扩展阅读文章
推荐阅读文章
花田文秘网 https://www.huatianclub.com
Copyright © 2002-2018 . 花田文秘网 版权所有